Calibración extrínseca
El documento Calibración extrínseca y homografía describe los fundamentos de la calibración extrínseca y la determinación de homografía, así como las bases del módulo extrinsics.py
El proyecto Picking-U2Net implementa este módulo.
extrinsics.py se puede usar como biblioteca que provee la clase ExtrinsicCalibrator importándose de esta manera:
from extrinsics import ExtrinsicCalibrator
o direcamente para una demo con la webcam:
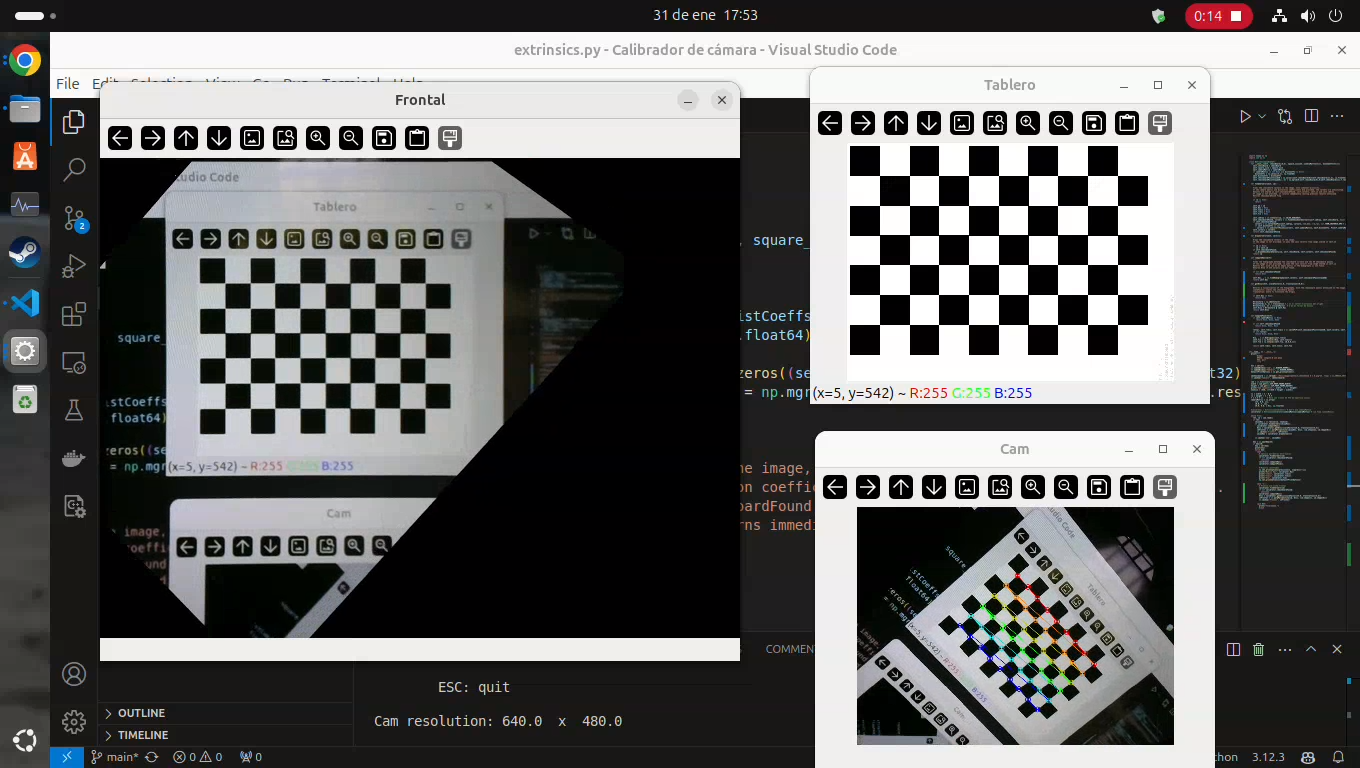
La imagen muestra una captura de pantalla de VSC ejecutando la demo de extrinsic.py. Tiene tres ventanas principales:
Tablero: patrón ajedrez, imagen estática (arriba a la derecha)
Cam: vista en vivo de la cámara
Frontal: produce una vista frontal, invariante a la pose de la cámara
La vista frontal demuestra que el sistema puede calcular coordenadas del mundo real, compensando la perspectiva de la cámara.
Este video de extrinsics.py muestra cómo convierte a coordenadas del mundo en tiempo real con la cámara en moviemiento.