Introducción a U2Net para Picking
Picking requiere un sensor que informe al robot las coordenadas donde tomar la pieza. Un sistema de visión artificial se puede programar a medida de cada tipo de pieza. Este proyecto adopta U2Net para reconocer cualquier pieza, incluso piezas nunca vistas (aquéllas que no formaron parte del entrenamiento del modelo).
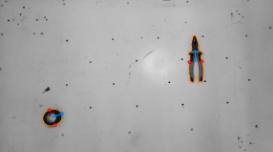
El presente sistema de detección de piezas se orienta al antipodal grasping, robots con grippers de dos dedos, y determina sobre la imagen los dos puntos por donde se debe tomar la pieza, anotados con círculos rojos.
Este proyecto no es un sistema completo de picking, sólo implementa la determinación de los puntos de agarre sobre la imagen. Para una demo completa sobre el robot se necesita también:
transformación de coordenadas, de píxeles al sistema de referencia del robot
implementación del servidor de coordenadas en una PC
programación del robot para obtener las coordenadas y proceder al picking
El documento Pick & place IA contiene la bitácora de instalación y pruebas con U2Net, y los fundamentos para el análisis de componente principal para la determinación de los puntos de agarre.
Ese documento profundiza en los principios de funcionamiento, pero no aborda el modo de uso de la biblioteca, que se explica más abajo.
U2Net
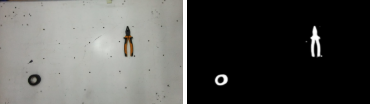
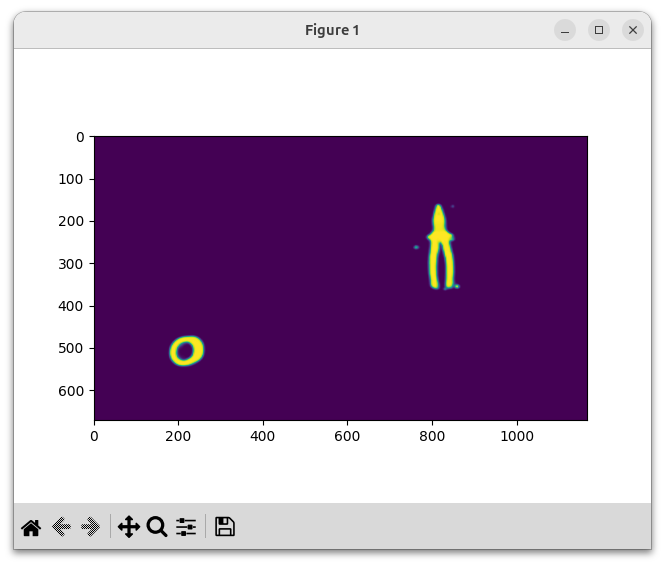
U2Net es un modelo de deep learning de la categoría SOD (Salient Object Detection), que produce una imagen monocromática segmentando los objetos para separarlos del fondo.
El repositorio de U2Net proporciona dos modelos entrenados:
u2net, de 176 Mb
u2netp, de 4,7 Mb, más liviano, rápido y menos preciso
Picking
El sistema binariza la segmentación de U2Net, releva contornos y realiza un análisis geométrico a partir de momentos para determinar los puntos de agarre.
El sistema sólo considera contornos externos y tiene mucho espacio para la mejora considerando contornos internos o la estabilidad de punto de agarre.
Instalación
Clonar el repositorio e instalar las dependencias, usualmente en un entorno virtual.
git clone https://github.com/Laboratorio-de-Robotica/Picking-U2Net
El repositorio contiene el modelo liviano u2netp. El modelo pesado u2net.pth se puede descargar del repositorio de u2net, o directamente de u2net.pth (176 Mb).
El archivo descargado se debe colocar en la carpeta model.
Dependencias
Esencialmente las dependencias de U2Net; para cada una se muestras dos versiones: las sugeridas por el sitio de U2Net y las usadas en este desarrollo, las actuales a inicios de 2025. Ambas funcionan y es muy posible que también funcionen con versiones posteriores.
Python 3.6, 3.12
numpy 1.15.2, 1.26.4
python-opencv 4.10
PyTorch 0.4.0, 2.6.0
torchvision 0.2.1, 0.21.0
Demo
u2Net predict
python u2net_predict.py --help
python u2net_predict.py
Procesa un archivo de imagen y muestra la segmentación de u2net. Permite elegir entre los modelos u2net y u2netp.
Picking
python pick.py --help
python pick.py
python pick.py -i ruta/imagen.jpg -m unetp
Picking también procesa una imagen y determina los puntos de agarre. Usa u2net_predict como primer paso.
Server
python server.py
En consola informa que el servidor está escuchando en una dirección y puerto. En otra terminal abrir telnet contra esa dirección y puerto. Enviar cualquier mensaje (escribir un texto y pulsar ENTER). El servidor responde con una cadena de ceros, confimando la conexión. Esa cadena de ceros informa que el servidor no detectó ningún objeto.
Los pasos siguientes son apenas una demo de funcionamiento del sistema; la calibración es ficticia y las coordenadas que se informan no son reales. Para usarlo hay que proceder a una calibración real y ajuste de coordenadas reales del robot.
Volviendo al servidor, éste abrió una ventana de la cámara. Hay que seguir estos pasos (nota: las pulsaciones de teclado sólo funcionan si la ventana activa es la de la cámara):
apuntar a un patrón de calibración ajedrez de 9x6 (hay uno en la carpeta images)
pulsar c para «calibrar»: aparecerá una ventana con una vista frontal del patrón, demostrando la homografía.
apuntar objetos con un fondo simple (como los objetos de la mesa del robot), procurando que el fondo llegue a todos los bordes de la imagen
pulsar d para «detectar»: aparecerán dos imágenes, la segmentación y la anotación de puntos de agarre
En este punto el servidor tiene coordenadas de picking. De vueltan en telnet, se envía cualquier mensaje y se obtiene la respuesta con coordenadas de picking. En la Referencia del código se explica cómo se interpretan estas coordenadas en el robot.
Estructura del código
model: carpeta con los modelos u2net y u2netp
u2net.py
dnn con torch, para u2net y u2netp
u2net.pth y u2netp.pth
ponderaciones torch de los modelos entrenados
u2net_predict.py
biblioteca para predicción (no para entrenamiento), que normaliza la entrada y la salida
define la clase U2netModel, en cuyo constructor se elige el modelo u2net o u2netp
importa u2net
pick.py
segmenta la imagen
obtiene los contornos
los analiza con momentos
determina puntos de agarre
los anota para visualización
importa u2net_predict
Uso en un sistema de picking
El uso dentro de un sistema requiere sólo:
model/
u2net_predict.py
pick.py
La integración al sistema se hace adoptando pick.py como biblioteca:
import PickU2Net from pick
Al final de pick.py se encuentra el código main que ejemplifica el uso de la clase PickU2Net, que se puede resumir en tre pasos:
picking = PickU2Net(model_name)
results = picking(input_image)
imVis = picking.annotate(input_image)
El primer paso se hace una sola vez al inicio.
El segundo paso se repite sobre cada imagen, y se obtienen los resultados buscados: los puntos de agarre.
results es un array de objetos (o None) con estas propiedades:
center
principalComponent
grabbingPoint0
grabbingPoint1
contour
El último paso es opcional, obtiene una imagen anotada.